


產(chǎn)品分類
更多相關(guān)產(chǎn)品
- LGZN-SZ02L型智能制造數(shù)字孿生虛擬仿真實(shí)訓(xùn)室
- LGGY-DS23型大田耕種機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS22型物理除草機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS21型大田作業(yè)機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS20型果園噴霧機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS19型果園采摘機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS18型果園應(yīng)用開發(fā)通用平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS17型智能割草機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS16型雙臂復(fù)合機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS15型七自由度機(jī)械臂實(shí)訓(xùn)裝置
- LGGY-DS14型六自由度機(jī)械臂套件實(shí)訓(xùn)裝置
- LGGY-DS13型具身復(fù)合機(jī)器人創(chuàng)新設(shè)計(jì)套裝實(shí)訓(xùn)裝置(增強(qiáng)版)
- LGGY-DS12型便攜式ROS導(dǎo)航機(jī)器人學(xué)習(xí)平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS11型基于大模型的智慧零售平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS10型農(nóng)業(yè)智能車實(shí)訓(xùn)裝置
- LGGY-DS09型智能服務(wù)機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS08型ROS基礎(chǔ)教學(xué)智能車實(shí)訓(xùn)裝置
- LGGY-DS07型視覺語(yǔ)音智能車實(shí)訓(xùn)裝置
- LGGY-DS06型人形機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS05型6足18自由度圓形仿生機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS04型無人駕駛深度學(xué)習(xí)智能車實(shí)訓(xùn)裝置
- LGGY-DS03型商服機(jī)器人-機(jī)械臂版及場(chǎng)地實(shí)訓(xùn)裝置
- LGGY-DS02型計(jì)算機(jī)視覺平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS01型智能汽車及賽道實(shí)訓(xùn)裝置
- LGGY-Z08型智能制造綜合產(chǎn)線
- LGGY-SJ03型機(jī)器人視覺分揀螺母工作站實(shí)訓(xùn)系統(tǒng)
- LGGY-WH05型工業(yè)機(jī)器人維護(hù)維修基礎(chǔ)教學(xué)工作站
- LGGY-F6A型服務(wù)機(jī)器人應(yīng)用技術(shù)實(shí)訓(xùn)平臺(tái)
- LGGY-K50型工業(yè)機(jī)器人應(yīng)用工作站
- LGGY-R04型工業(yè)機(jī)器人一體化實(shí)訓(xùn)平臺(tái)
- LGGY-R02B型智能生產(chǎn)線運(yùn)行與維護(hù)綜合實(shí)訓(xùn)裝置
- LGGY-T03A型智能制造單元系統(tǒng)集成應(yīng)用平臺(tái)
- LGGY-W01A型工業(yè)機(jī)器人應(yīng)用工作站
- LGGY-S2型工業(yè)機(jī)器人與智能視覺系統(tǒng)應(yīng)用實(shí)驗(yàn)平臺(tái)
- LG-MPS02型模塊化柔性自動(dòng)化生產(chǎn)線實(shí)訓(xùn)系統(tǒng)(八站)
- LGJ-IMS03型工業(yè)機(jī)器人模塊化智能生產(chǎn)線實(shí)訓(xùn)系統(tǒng)
- LGJ-KY02型智能機(jī)器人智能制造綜合實(shí)操工作站
- LGJ-QBJ01型工業(yè)機(jī)器人模擬汽車領(lǐng)金沖壓集成制造實(shí)訓(xùn)系統(tǒng)
- LGJ-CNC02型工業(yè)機(jī)器人智能生產(chǎn)流水線實(shí)訓(xùn)平臺(tái)
- LGJ-ZH03型工業(yè)機(jī)器人組合式應(yīng)用實(shí)訓(xùn)裝置
LGGY-DS01型智能汽車及賽道實(shí)訓(xùn)裝置

一、智能汽車組成
智能汽車完成人工智能、無人駕駛、圖像處理與運(yùn)控控制等相關(guān)課程的學(xué)習(xí),理論+實(shí)踐共48課時(shí)。支持C++/Python語(yǔ)言編程,基于百度飛槳(PaddlePaddle)AI框架和OpenCV圖像處理技術(shù),實(shí)現(xiàn)在線AI模型訓(xùn)練、移動(dòng)端部署、賽道識(shí)別與交通標(biāo)志檢測(cè),車輛控制以及巡線導(dǎo)航等功能。產(chǎn)品采用雙主控架構(gòu),控制主板為Edgeboard計(jì)算卡,負(fù)責(zé)復(fù)雜算法和圖像處理工作,控制單元為GD32系列單片機(jī),負(fù)責(zé)智能汽車運(yùn)動(dòng)傳感器數(shù)據(jù)采集、電機(jī)控制等工作,并具備攝像頭、陀螺儀、編碼器、電量計(jì)等傳感器。
1、平臺(tái)功能:實(shí)現(xiàn)圖像識(shí)別,圖像處理,車輛控制以及自動(dòng)駕駛等功能;
2、圖像處理:攝像頭校正,車道線識(shí)別,賽道元素識(shí)別、賽道測(cè)量;
3、路徑規(guī)劃:基于貝塞爾(Bezier)曲線的加權(quán)軌跡規(guī)劃;
4、運(yùn)動(dòng)控制:閉環(huán)PID速度控制和PD姿態(tài)控制;
5、目標(biāo)檢測(cè):基于Yolo-v3的多目標(biāo)實(shí)時(shí)檢測(cè)(FPS<60ms,Map>90%);
6、多線程任務(wù):圖像采集與賽道識(shí)別周期:30ms;AI目標(biāo)檢測(cè)周期:34ms;
7、車檢助手:車輛自檢,車輛配置(舵機(jī)),車輛狀態(tài)監(jiān)控(電量/速度/姿態(tài)等);
8、車輛尺寸:長(zhǎng)×寬×高為316×190×110mm(不含攝像頭碳纖桿),316×190×360mm(含攝像頭碳纖桿);
9、硬件:硬件含智能汽車1臺(tái),手柄1個(gè),電源適配器1個(gè),網(wǎng)線1根;
10、車輛采用3S鋰電池供電,最大速度10m/s,舵機(jī)控制阿克曼轉(zhuǎn)向,最小轉(zhuǎn)彎半徑約25cm;
11、系統(tǒng)環(huán)境:Linux系統(tǒng) Ubuntu18.04;
12、控制主板:Edgeboard計(jì)算卡,處理器:4核A75@1.8GHz+4核A55@1.8GHz,內(nèi)存:4GB,LPDDR4x,AI算力:3.2TOPs@int8;
13、控制單元:1塊GD32單片機(jī)板,采用了ARM Cortex-M3內(nèi)核,電機(jī)驅(qū)動(dòng)高精度速控為40ns/30KHz,BM3451 3S鋰電池平衡充電與放電保護(hù)模塊, SL2.1S USB2.0 1托4擴(kuò)展芯片,舵機(jī)驅(qū)動(dòng)TPS5430 6.35v/5A;
14、電機(jī):1個(gè)直流高速電機(jī),額定電壓12V,空載轉(zhuǎn)速12000rpm;
15、舵機(jī):1個(gè)高精度數(shù)字舵機(jī) 0.14Sec/60°;
16、電池:1塊3S 25C鋰電池 標(biāo)稱11.1V ,容量2200mAh ;
17、攝像頭:1個(gè)640×480分辨率的30萬(wàn)像素?cái)z像頭;
18、輪胎:4個(gè)橡膠輪胎,輕便,抓地力強(qiáng);
19、通信方式:支持Ethernet、USB、UART通信;
20、課程:課程理論+實(shí)踐共48課時(shí),含課程大綱,課程講義,實(shí)訓(xùn)手冊(cè),課件,教案,實(shí)踐代碼,視頻文件以及考核資料包;
21、軟件:軟件含車輛配置軟件(Windows版),AI系統(tǒng)鏡像(Linux系統(tǒng)Ubuntu18.04,Python3.6),AI算法包(Yolo-v3),底層支持庫(kù)(OpenCV,Joystick,Serial,Pthread,Paddle等);
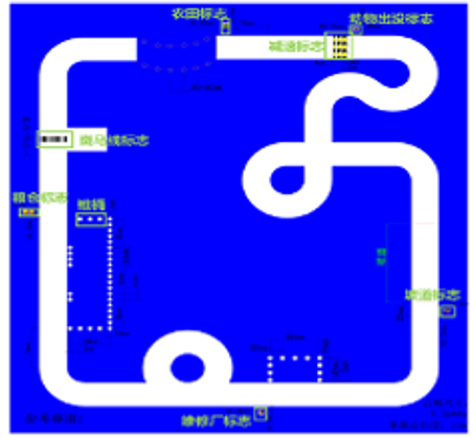
二、賽道參數(shù)
智能汽車賽道是PVC賽道,有黑白膠帶、藍(lán)色背景布、坡道、賽道元素標(biāo)志、錐桶等。
1、場(chǎng)地支持7.5m*5.5m與7.5m*8m兩種尺寸,PVC賽道;
2、賽道基礎(chǔ)元素套裝,包含直線賽道,曲線彎道,交叉路口,環(huán)島,三岔路口和車庫(kù)元素;
3、賽道藍(lán)底布尺寸至少可鋪設(shè)7.5m*8m;
4、賽道邊界黑膠帶10卷,連接白膠帶10卷;
5、木質(zhì)坡道1個(gè),長(zhǎng)寬高:150cm*60cm*14cm;
6、黃色塑料錐桶56個(gè),底部直徑74mm,高度74mm;
7、標(biāo)志3D打印套裝1套,車輛維護(hù)標(biāo)志*1、農(nóng)田標(biāo)志*1、減速標(biāo)志*1、坡道標(biāo)志*1、糧倉(cāng)標(biāo)志*2;
8、標(biāo)定板1塊,360mm*270mm;
9、賽道圍欄80片,黑色,35cm*45cm;
10、裁判系統(tǒng)1套,是自動(dòng)計(jì)時(shí)裁判系統(tǒng),帶有控制器和觸發(fā)線圈,通過電磁感應(yīng)原理進(jìn)行車輛運(yùn)行的自動(dòng)計(jì)時(shí);連接到電腦上位機(jī)上,與裁判系統(tǒng)軟件進(jìn)行數(shù)據(jù)同步,實(shí)時(shí)顯示隊(duì)伍信息和比賽用時(shí)。