


產(chǎn)品分類
更多相關(guān)產(chǎn)品
- LGGY-BL23X型人形機(jī)器人七軸手臂科研應(yīng)用
- LGGY-BL22X型具身智能機(jī)器人實(shí)訓(xùn)設(shè)備
- LGGY-BL21X型多機(jī)器人協(xié)同與視覺感知實(shí)訓(xùn)生產(chǎn)線
- LGGY-BL20X型桌面式智能制造生產(chǎn)線
- LGGY-BL19X型多功能智能建造機(jī)器人系統(tǒng)
- LGGY-BL18X型視覺感知與工業(yè)機(jī)器人實(shí)訓(xùn)平臺(tái)
- LGGY-BL17X型3D工業(yè)視覺檢測(cè)實(shí)訓(xùn)平臺(tái)
- LGGY-BL16X型復(fù)合C型移動(dòng)協(xié)作機(jī)器人實(shí)訓(xùn)設(shè)備
- LGGY-BL15X型復(fù)合B型移動(dòng)協(xié)作機(jī)器人實(shí)訓(xùn)設(shè)備
- LGGY-BL14X型復(fù)合A型移動(dòng)協(xié)作機(jī)器人實(shí)訓(xùn)設(shè)備
- LGGY-BL13X型AI智能交互機(jī)器人實(shí)訓(xùn)設(shè)備
- LGGY-BL12X型基于視覺的移動(dòng)抓取機(jī)器人 品牌:理工偉業(yè) 咨詢電話:010-82827827 82827835
- LGGY-BL11X型移動(dòng)機(jī)器人應(yīng)用開發(fā)平臺(tái)
- LGGY-BL10X型機(jī)器人大模型與視覺自動(dòng)分揀生產(chǎn)線
- LGGY-BL10X型機(jī)器人大模型與視覺自動(dòng)分揀生產(chǎn)線
- LGGY-BL09X型機(jī)器人大模型與視覺檢測(cè)生產(chǎn)線
- LGGY-BL08X型機(jī)器人大模型與視覺協(xié)同控制平臺(tái)
- LGGY-BL07X型六軸機(jī)器人自動(dòng)分揀生產(chǎn)線
- LGGY-BL05X型多模態(tài)機(jī)器人大模型與視覺協(xié)同系統(tǒng)
- LGGY-BL06X型六軸機(jī)器人視覺檢測(cè)生產(chǎn)線
- LGGY-BL04X型七軸協(xié)作機(jī)器人實(shí)訓(xùn)設(shè)備
- LGGY-BL03X型六軸協(xié)作機(jī)器人實(shí)訓(xùn)設(shè)備
- LGGY-BL02X型桌面六軸機(jī)器人拆裝套件
- LGGY-BL01X型桌面六軸機(jī)器人實(shí)訓(xùn)設(shè)備
- LGZN-SZ02L型智能制造數(shù)字孿生虛擬仿真實(shí)訓(xùn)室
- LGGY-DS23型大田耕種機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS22型物理除草機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS21型大田作業(yè)機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS20型果園噴霧機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS19型果園采摘機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS18型果園應(yīng)用開發(fā)通用平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS17型智能割草機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS16型雙臂復(fù)合機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS15型七自由度機(jī)械臂實(shí)訓(xùn)裝置
- LGGY-DS14型六自由度機(jī)械臂套件實(shí)訓(xùn)裝置
- LGGY-DS13型具身復(fù)合機(jī)器人創(chuàng)新設(shè)計(jì)套裝實(shí)訓(xùn)裝置(增強(qiáng)版)
- LGGY-DS12型便攜式ROS導(dǎo)航機(jī)器人學(xué)習(xí)平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS11型基于大模型的智慧零售平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS10型農(nóng)業(yè)智能車實(shí)訓(xùn)裝置
- LGGY-DS09型智能服務(wù)機(jī)器人實(shí)訓(xùn)裝置
LGGY-BL22X型具身智能機(jī)器人實(shí)訓(xùn)設(shè)備
一、產(chǎn)品概述
具身智能作為人工智能技術(shù)與機(jī)器人技術(shù)深度融合的前沿領(lǐng)域,代表了未來(lái)智能系統(tǒng)發(fā)展的重要方向。本方案中的系列產(chǎn)品,在結(jié)構(gòu)上,主要由機(jī)器人(如七軸協(xié)作機(jī)械臂、移動(dòng)機(jī)器人)、視覺感知系統(tǒng)、語(yǔ)音交互模塊、中央運(yùn)算單元組成。在功能上,通過在中央運(yùn)算單元內(nèi)部署如DeepSeek等前沿的大模型技術(shù),以及力控反饋、人機(jī)交互等技術(shù),使其能夠理解復(fù)雜的指令,進(jìn)行邏輯推理,判斷用戶的真實(shí)意圖,從而自主規(guī)劃并執(zhí)行相應(yīng)任務(wù),這也是具身智能機(jī)器人與傳統(tǒng)機(jī)器人的根本區(qū)別。
該系列產(chǎn)品,不僅可以滿足用戶的科研、開發(fā)需求,還可以為智能制造、醫(yī)療服務(wù)和商業(yè)服務(wù)等場(chǎng)景提供全新的解決方案。
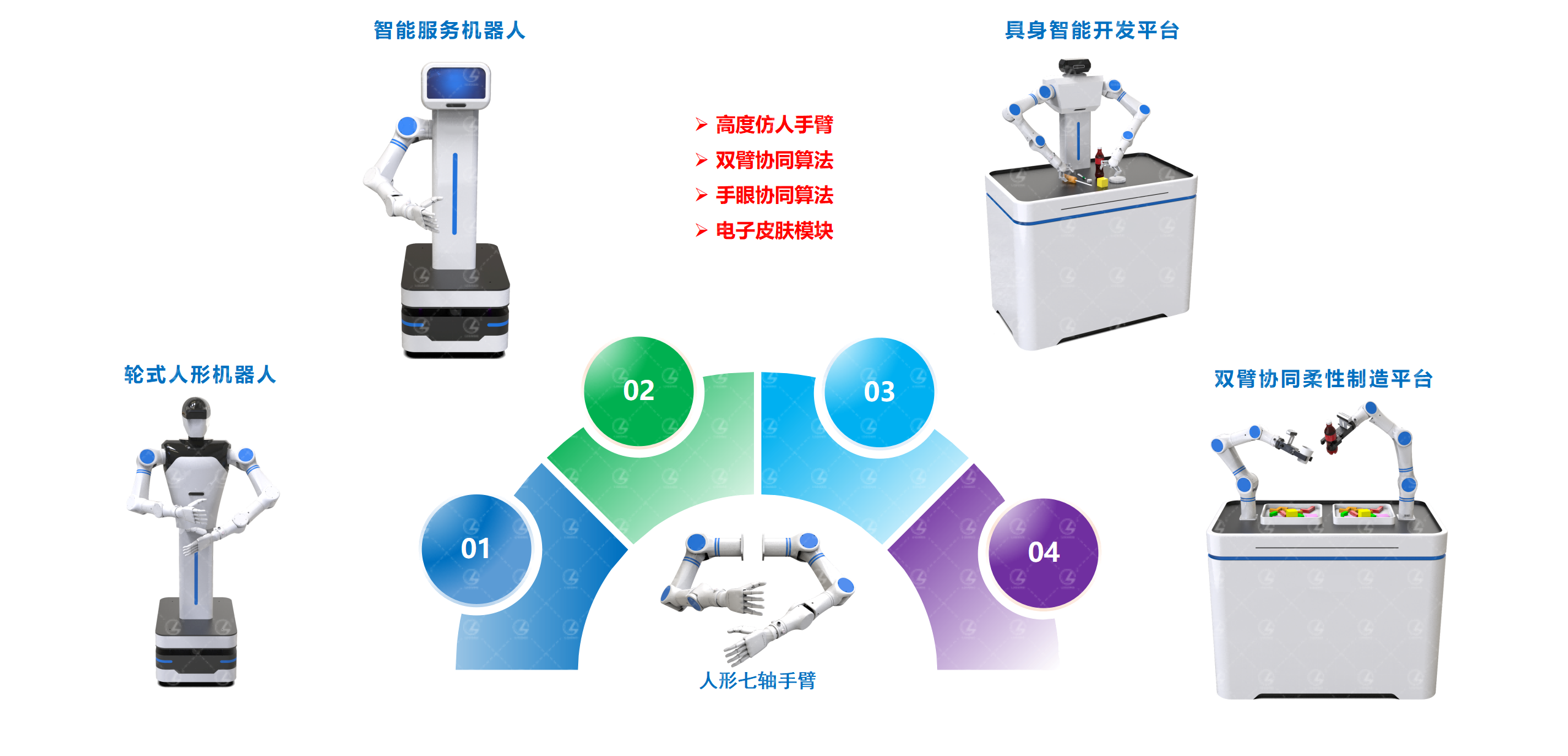
1.輪式人形機(jī)器人
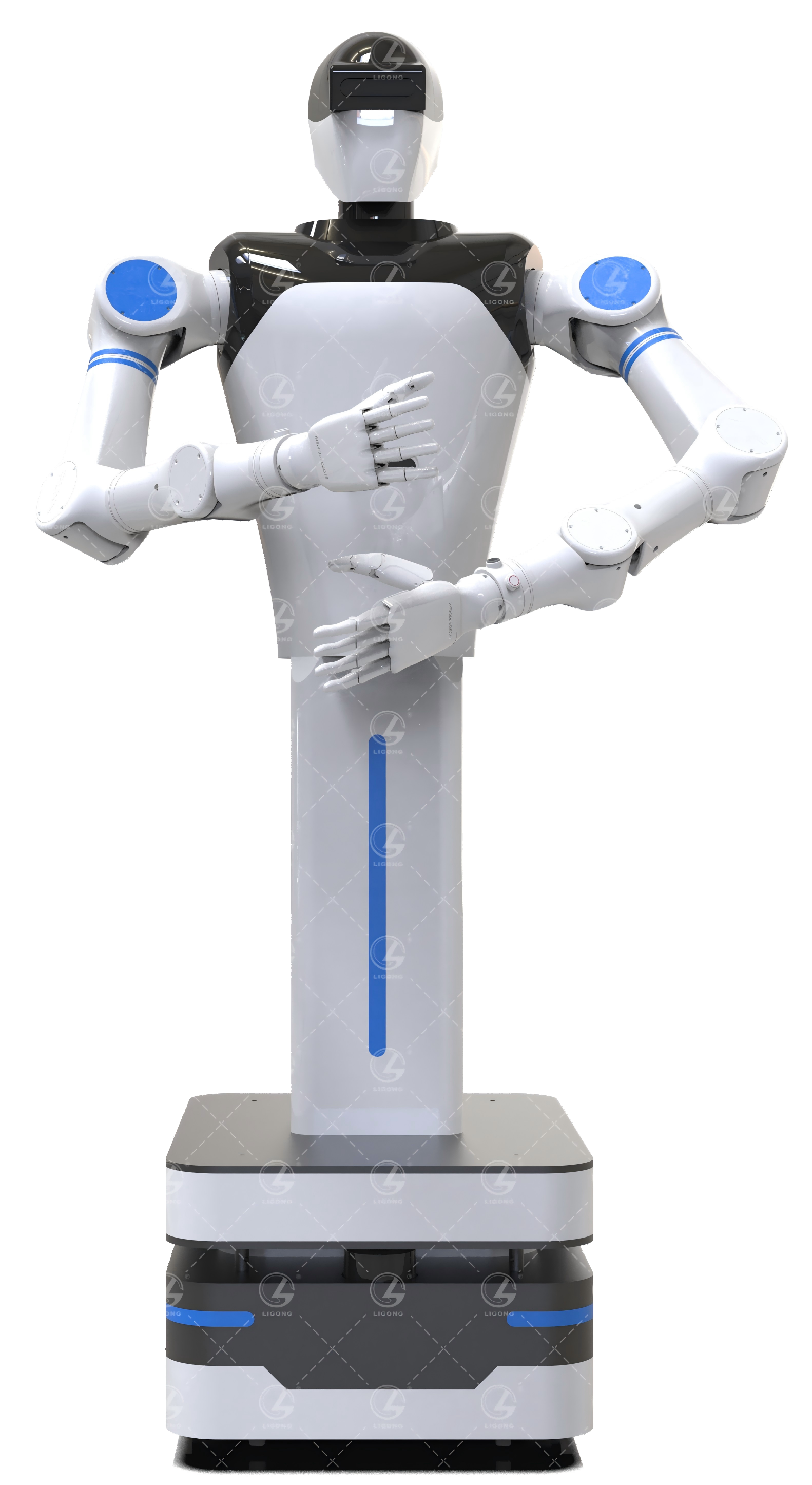
人形機(jī)器人由仿生雙臂系統(tǒng)、多模態(tài)感知單元,以及中央運(yùn)算單元構(gòu)成,并通過全向移動(dòng)底盤實(shí)現(xiàn)自主導(dǎo)航。在仿生雙臂系統(tǒng)中,內(nèi)置了電子皮膚和力傳感器,以便于用戶開發(fā)基于本體感知的雙臂動(dòng)態(tài)防碰撞算法,且雙臂采用七自由度仿生關(guān)節(jié),能夠模擬人類上肢“肩-肘-腕”運(yùn)動(dòng)鏈的靈活性。該雙臂構(gòu)型適用于多類場(chǎng)景應(yīng)用,比如完成倒水、疊衣服等家庭服務(wù),或從事工業(yè)生產(chǎn)、水果采摘等行業(yè)應(yīng)用??偟膩?lái)說(shuō),該產(chǎn)品是一款深度融合仿生學(xué)設(shè)計(jì)、高自由度控制與具身智能技術(shù)的先進(jìn)科研平臺(tái),支持面向復(fù)雜環(huán)境實(shí)驗(yàn)、動(dòng)態(tài)環(huán)境交互及跨模態(tài)人機(jī)協(xié)作等場(chǎng)景開展研發(fā)工作。
2.智能服務(wù)機(jī)器人
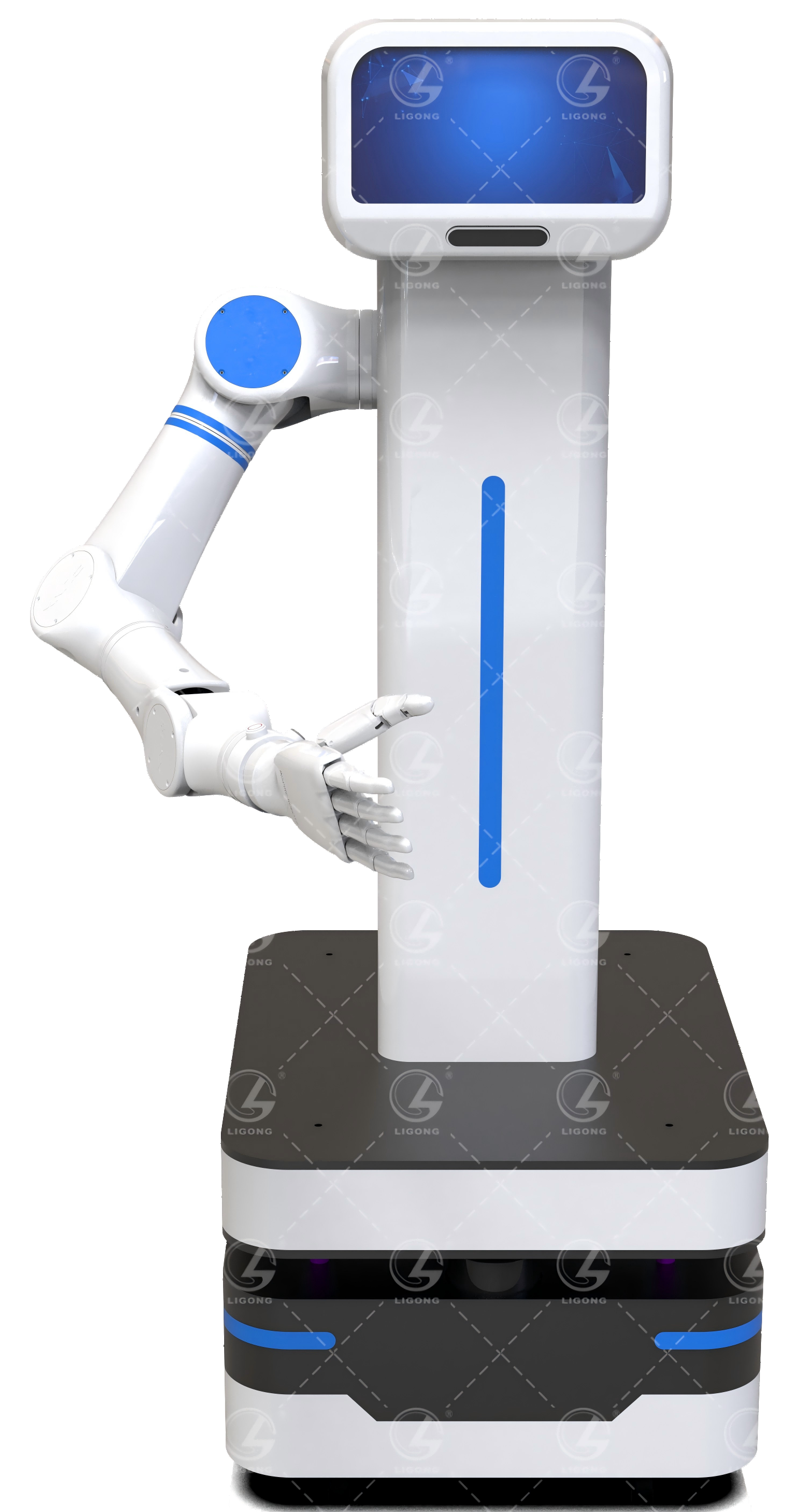
智能服務(wù)機(jī)器人融合了移動(dòng)機(jī)器人的自主導(dǎo)航能力與七軸人形手臂的高度擬人化能力,可以面向服務(wù)場(chǎng)景開展豐富的應(yīng)用。在結(jié)構(gòu)上,采用中央運(yùn)算單元進(jìn)行推理與決策,并通過配備的深度視覺系統(tǒng)、麥克風(fēng)陣列及激光雷達(dá)構(gòu)成多模態(tài)環(huán)境感知網(wǎng)絡(luò),可以感知人體位置、距離、手勢(shì)動(dòng)作、聲音特性等多種信息,從而實(shí)現(xiàn)與用戶的高度自主交互。產(chǎn)品適用于展廳講解、商超導(dǎo)覽、校園接待等應(yīng)用場(chǎng)景。
3.雙臂協(xié)同柔性制造平臺(tái)

該平臺(tái)主要面向生產(chǎn)制造場(chǎng)景。通過采用雙臂控制系統(tǒng),以及部署在中央運(yùn)算單元內(nèi)的多模態(tài)大模型的智能分析能力,實(shí)現(xiàn)對(duì)復(fù)雜作業(yè)場(chǎng)景的分析推理與決策,最終精準(zhǔn)執(zhí)行各項(xiàng)任務(wù)。在實(shí)際操作中,用戶可以根據(jù)具體需求選擇不同類型的末端執(zhí)行器,比如吸盤、夾爪、靈巧手,結(jié)合大模型的學(xué)習(xí)和推理能力,可以不斷優(yōu)化雙臂的運(yùn)動(dòng)方式,逐步提升系統(tǒng)的作業(yè)效率與準(zhǔn)確性。該平臺(tái)可應(yīng)用于零部件裝配、上下料、良次品分揀等多種柔性制造工序。
4.具身智能開發(fā)平臺(tái)

平臺(tái)以一臺(tái)人形機(jī)器人的上半身為主體結(jié)構(gòu),通過將其安裝在操作平臺(tái)上,可以面向生產(chǎn)或生活場(chǎng)景,以高度擬人的形態(tài)開展多樣化的應(yīng)用,為具身智能的前沿研究開辟了全新的創(chuàng)新平臺(tái)。平臺(tái)通過深度相機(jī)實(shí)時(shí)獲取作業(yè)區(qū)域內(nèi)的三維信息,結(jié)合內(nèi)置的中央運(yùn)算單元,以及部署的大模型技術(shù),能夠準(zhǔn)確識(shí)別物體的形狀、位置和姿態(tài),從而控制雙臂進(jìn)行高精度的仿人作業(yè)。除此之外,該系統(tǒng)還內(nèi)置強(qiáng)化學(xué)習(xí)算法,并配置遙操作系統(tǒng),可用于協(xié)同控制算法、多模態(tài)感知與決策、自主進(jìn)化等具身智能領(lǐng)域的先進(jìn)算法開發(fā)與驗(yàn)證。
二、產(chǎn)品功能和特點(diǎn)
1.具身智能與自主決策
本方案的相關(guān)產(chǎn)品,均采用自研的七軸人形手臂,通過和視覺、語(yǔ)音、傳感器等技術(shù)的深度融合,構(gòu)建了“環(huán)境感知-決策-執(zhí)行”閉環(huán),形成多模態(tài)環(huán)境感知網(wǎng)絡(luò)。所有產(chǎn)品均部署大模型技術(shù),可以理解用戶的復(fù)雜指令,推理出真實(shí)意圖,并最終做出決策和反饋。例如,在工業(yè)分揀場(chǎng)景中,用戶可以發(fā)出如“把桌上的螺絲刀放到貨架上的藍(lán)色盒子里”的語(yǔ)音指令,系統(tǒng)收到該指令后,進(jìn)行如下推理:抓取目標(biāo)(螺絲刀)、目標(biāo)位置(桌上)、放置位置(藍(lán)色盒子)、放置位置坐標(biāo)(貨架),然后,通過視覺系統(tǒng)的協(xié)同,自主生成該任務(wù)的分步驟指令,準(zhǔn)確完成相關(guān)任務(wù)。同時(shí),在任務(wù)執(zhí)行過程中,可以融合視覺、觸覺、位置等環(huán)境信息,不斷優(yōu)化任務(wù)執(zhí)行效率。
2.雙臂協(xié)同控制
雙臂系統(tǒng)選用了自研的七軸人形手臂,完全開放底層源代碼,支持二次開發(fā),同時(shí)具備廣泛的運(yùn)動(dòng)范圍和高度的運(yùn)動(dòng)精確度,能夠模擬人類手臂的大部分自然動(dòng)作。
在控制方面,采用了一控二的協(xié)同控制系統(tǒng),即一個(gè)控制器控制兩臺(tái)手臂,該方式可以有效的實(shí)現(xiàn)雙臂協(xié)同與沖突規(guī)避,同時(shí)通過強(qiáng)化學(xué)習(xí)算法動(dòng)態(tài)分配任務(wù)優(yōu)先級(jí)。比如,給機(jī)器人規(guī)劃疊衣服的任務(wù)時(shí),系統(tǒng)可以快速給出最優(yōu)動(dòng)作規(guī)劃,還能避免雙臂“打架”的情況,配備的電子皮膚則讓雙臂系統(tǒng)在工作時(shí),及時(shí)感知周圍環(huán)境的變化,結(jié)合大模型的決策能力,實(shí)時(shí)調(diào)整運(yùn)動(dòng)路徑和姿態(tài),實(shí)現(xiàn)更加精細(xì)的操作。
3.強(qiáng)化學(xué)習(xí)與自主進(jìn)化
通過分層強(qiáng)化學(xué)習(xí)框架與跨場(chǎng)景遷移學(xué)習(xí)機(jī)制,賦予具身智能機(jī)器人持續(xù)適應(yīng)復(fù)雜環(huán)境的能力。比如機(jī)器人在執(zhí)行“幫我拿水過來(lái)”這個(gè)動(dòng)作時(shí),用戶可以使用強(qiáng)化學(xué)習(xí)算法訓(xùn)練機(jī)器人,將識(shí)別任務(wù)(尋找水杯)、移動(dòng)任務(wù)(移動(dòng)到目的地)、抓取任務(wù)(采用合適的角度和姿態(tài)拿水杯)進(jìn)行任務(wù)分解與策略分層,縮短訓(xùn)練周期。而通過持續(xù)學(xué)習(xí)與環(huán)境交互后,機(jī)器人則可以動(dòng)態(tài)優(yōu)化自身行為模型,完成自主進(jìn)化,快速適應(yīng)多種復(fù)雜應(yīng)用場(chǎng)景,構(gòu)建具身智能模型。
強(qiáng)化學(xué)習(xí)與自主進(jìn)化的結(jié)合將推動(dòng)人形機(jī)器人向“通用智能體”發(fā)展,實(shí)現(xiàn)完全自主決策。
4.多模態(tài)感知與融合
機(jī)器人配置了豐富的傳感器,如深度視覺、語(yǔ)音識(shí)別、激光雷達(dá)、超聲波測(cè)距、電子皮膚、觸覺反饋等,構(gòu)建了一個(gè)完善的機(jī)器人環(huán)境感知系統(tǒng)。在具體應(yīng)用上,機(jī)器人內(nèi)部安裝的語(yǔ)音識(shí)別模塊,支持聲音檢測(cè)、智能語(yǔ)音識(shí)別、聲源定位等功能;機(jī)器人頭部和軀干的的深度視覺系統(tǒng),可以實(shí)現(xiàn)語(yǔ)音、手勢(shì)、表情、物料、零部件等多種交互信息和產(chǎn)品信息的收集。通過搭載的中央運(yùn)算單元,機(jī)器人在人機(jī)交互過程中,可實(shí)現(xiàn)自然語(yǔ)言指令解析,從而引導(dǎo)機(jī)器人執(zhí)行指定動(dòng)作,開展人機(jī)協(xié)作、語(yǔ)音控制等AI實(shí)踐。
三、技術(shù)架構(gòu)
具身智能機(jī)器人通過多模態(tài)感知網(wǎng)絡(luò)、中央運(yùn)算單元、雙七軸手臂、AI大模型和多類自主學(xué)習(xí)算法的有機(jī)融合,構(gòu)建了包含“感知-認(rèn)知-執(zhí)行-學(xué)習(xí)”四層架構(gòu)的智能模型。
1.物理感知層
物理感知層作為具身智能機(jī)器人的輸入層,通過多模態(tài)傳感器實(shí)時(shí)捕捉環(huán)境信息,以此來(lái)作為機(jī)器人進(jìn)行認(rèn)知與自主決策的依據(jù)。
2.決策認(rèn)知層
決策認(rèn)知層依托多模態(tài)大模型為具身智能機(jī)器人提供全面的感知和認(rèn)知能力。多模態(tài)大模型通過理解和分析物理感知層反饋的視覺、觸覺、語(yǔ)音等環(huán)境感知數(shù)據(jù),推理出類似人類行為的動(dòng)作模型。
3.行動(dòng)執(zhí)行層
行動(dòng)執(zhí)行層主要由高自由度的七軸人形手臂和全向活動(dòng)的移動(dòng)底盤兩部分組成,這些機(jī)器人硬件設(shè)備能夠根據(jù)決策認(rèn)知層下達(dá)的子任務(wù)指令和各種動(dòng)作模型,實(shí)現(xiàn)如人類活動(dòng)的各種行動(dòng)能力。
4.學(xué)習(xí)反饋層
學(xué)習(xí)反饋層通過與其他層級(jí)之間的協(xié)同工作,構(gòu)建了以強(qiáng)化學(xué)習(xí)、模仿學(xué)習(xí)等算法網(wǎng)絡(luò)為主的優(yōu)化閉環(huán)。通過自主學(xué)習(xí)的算法網(wǎng)絡(luò),具身智能機(jī)器人在實(shí)際環(huán)境中能夠不斷進(jìn)行試錯(cuò)和學(xué)習(xí),根據(jù)環(huán)境的反饋信息來(lái)調(diào)整動(dòng)作規(guī)范,以最大化累積獎(jiǎng)勵(lì)為目標(biāo),實(shí)現(xiàn)對(duì)推理與決策過程的優(yōu)化和改進(jìn)。
四、應(yīng)用方向
1.科研場(chǎng)景人機(jī)協(xié)作
2.商業(yè)服務(wù)機(jī)器人
3.智慧農(nóng)業(yè)機(jī)器人
4.家居服務(wù)機(jī)器人